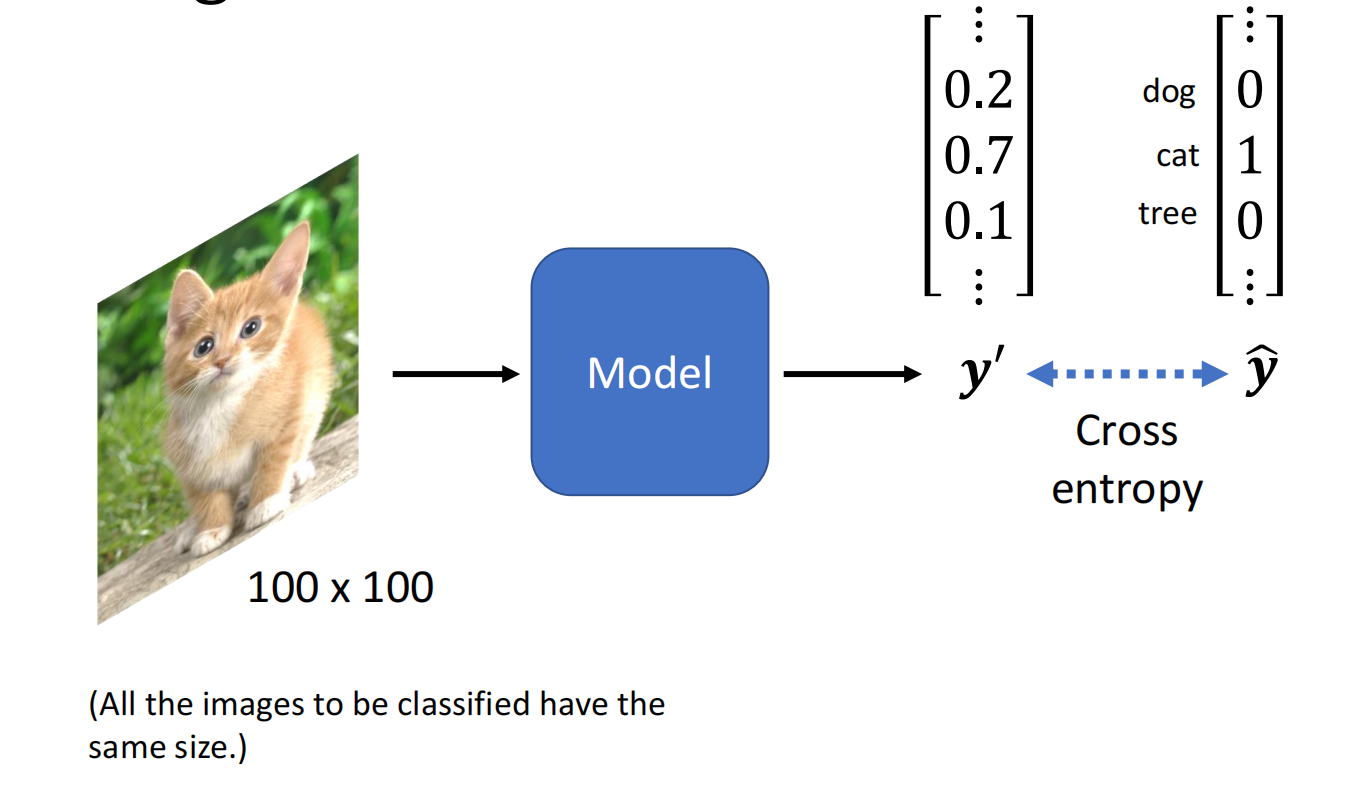
图像识别:输入一张 $100 \times 100$ 的图片,输出识别结果
Introduction 1
对于机器来说,一张图片是一个三维的tensor(长、宽、channel),把矩阵拉直成向量
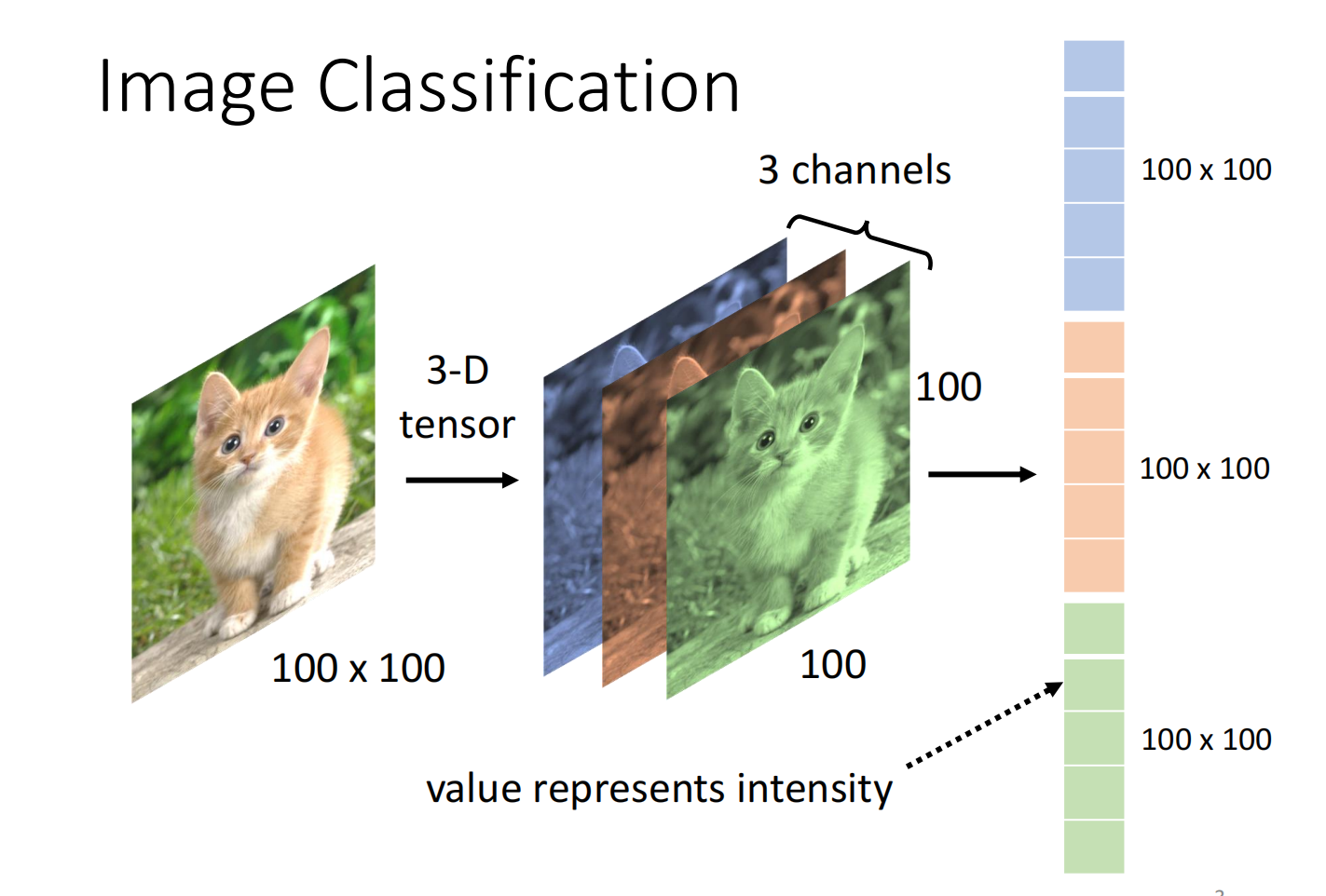
如果我们把它输入到DNN中,会导致参数过多,有过拟合的风险
考虑到图像本身的特性,我们不需要每一个neuron和dimension都有一个weight
Simplification 1: receptive field
第一点:我们可以检测有没有出现一些特别重要的部分,能够代表某种物件

所以不需要把整张图片作为输入,根据这个观察,我们进行第一个简化
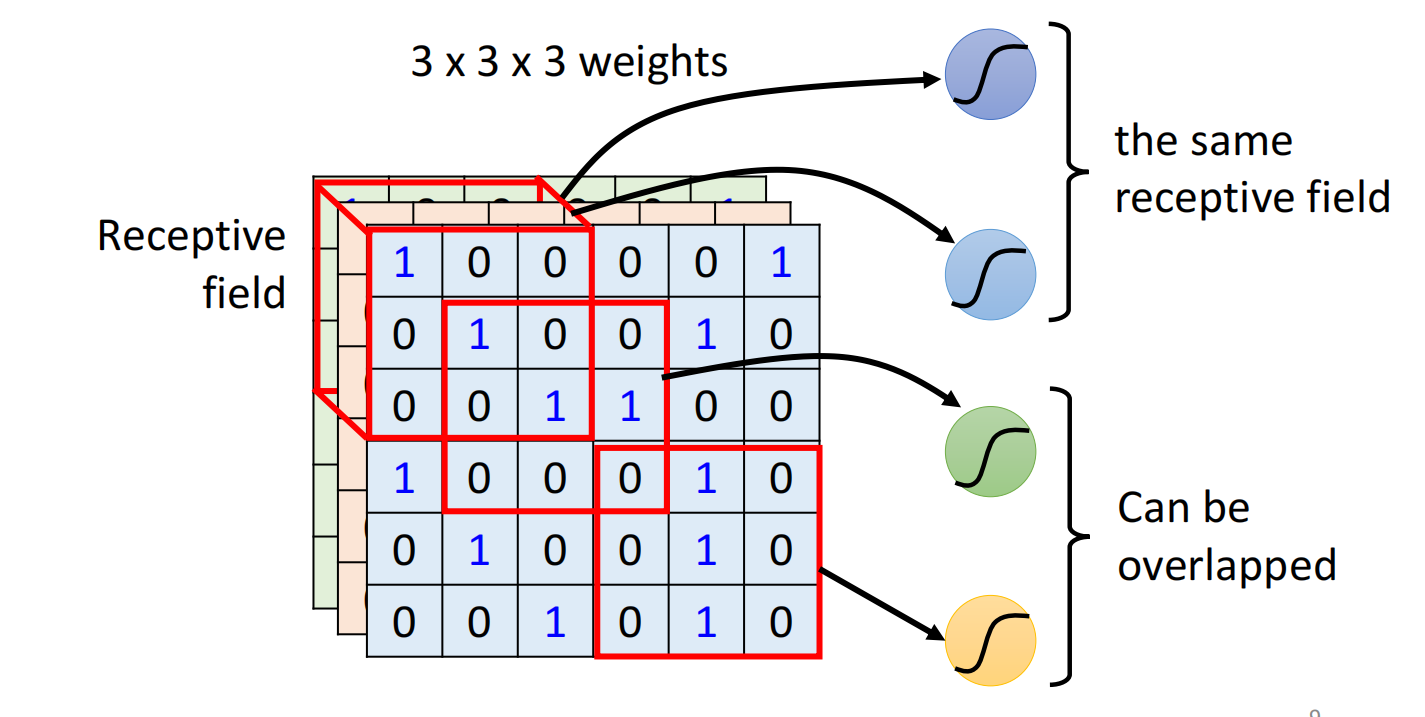
设定一个区域,称之为Receptive Field,每一个Neuron都只关心自己所在的receptive field里面发生的事情,如图所示:

receptive field彼此之间也是可以重叠,同个范围也可以有多个不同的neuron
下面是一种最经典的receptive field的安排方式:
- 会看所有的channel,因此我们不用再考虑深度,高跟宽合起来叫做kernel size,kernnel size一般不会设置太大($3 \times 3$)
- 一般同一个receptive field,会有一组neuron去关注这个范围
- 把一个receptive field移动一定范围形成一个新的receptive field,这个距离称之为stride,也不会设置过大,一般是 $1$ 或者 $2$
- 当receptive field 部分超出了范围时,可以做padding(补0)(补其他值均可)

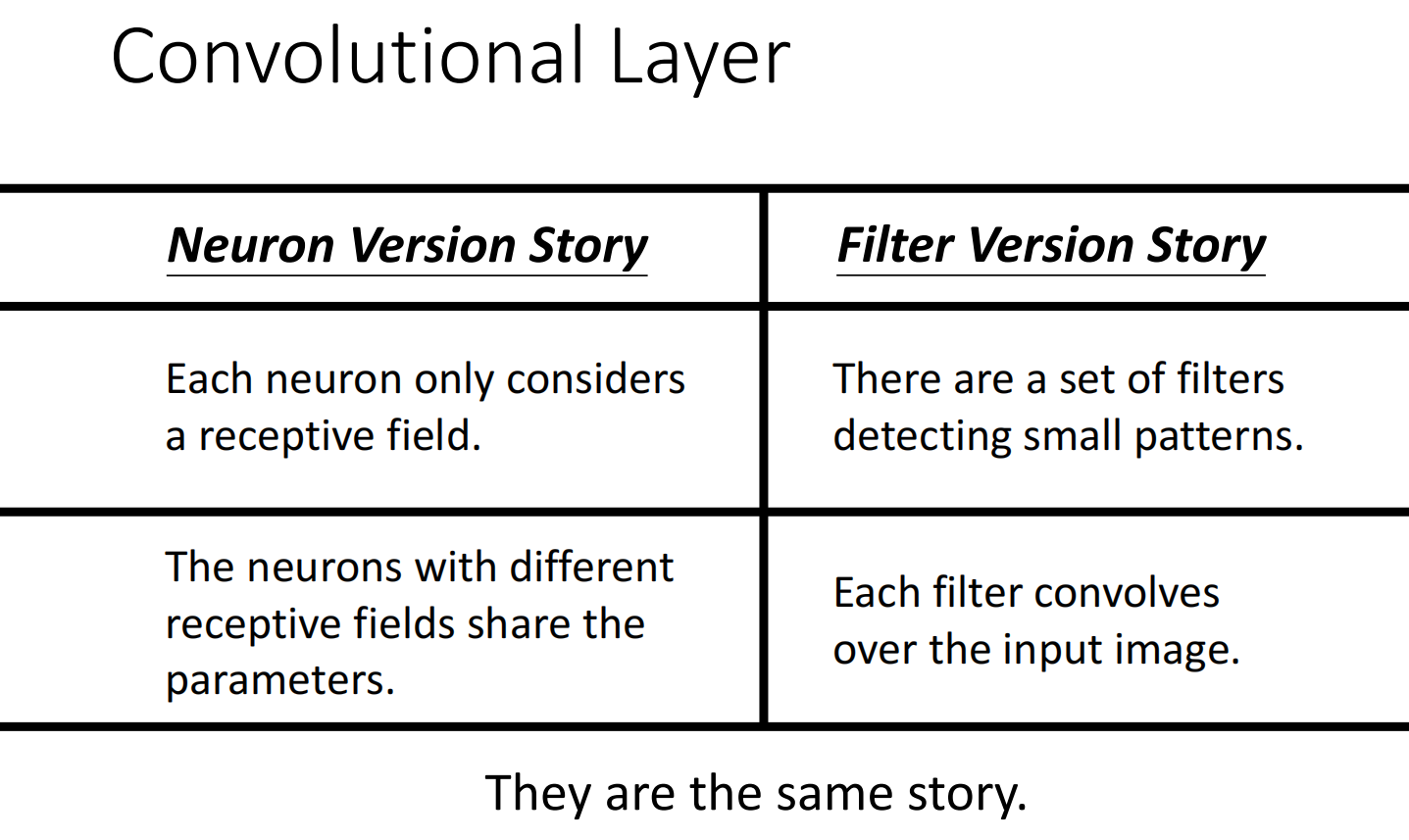
Simplification 2: parameter sharing
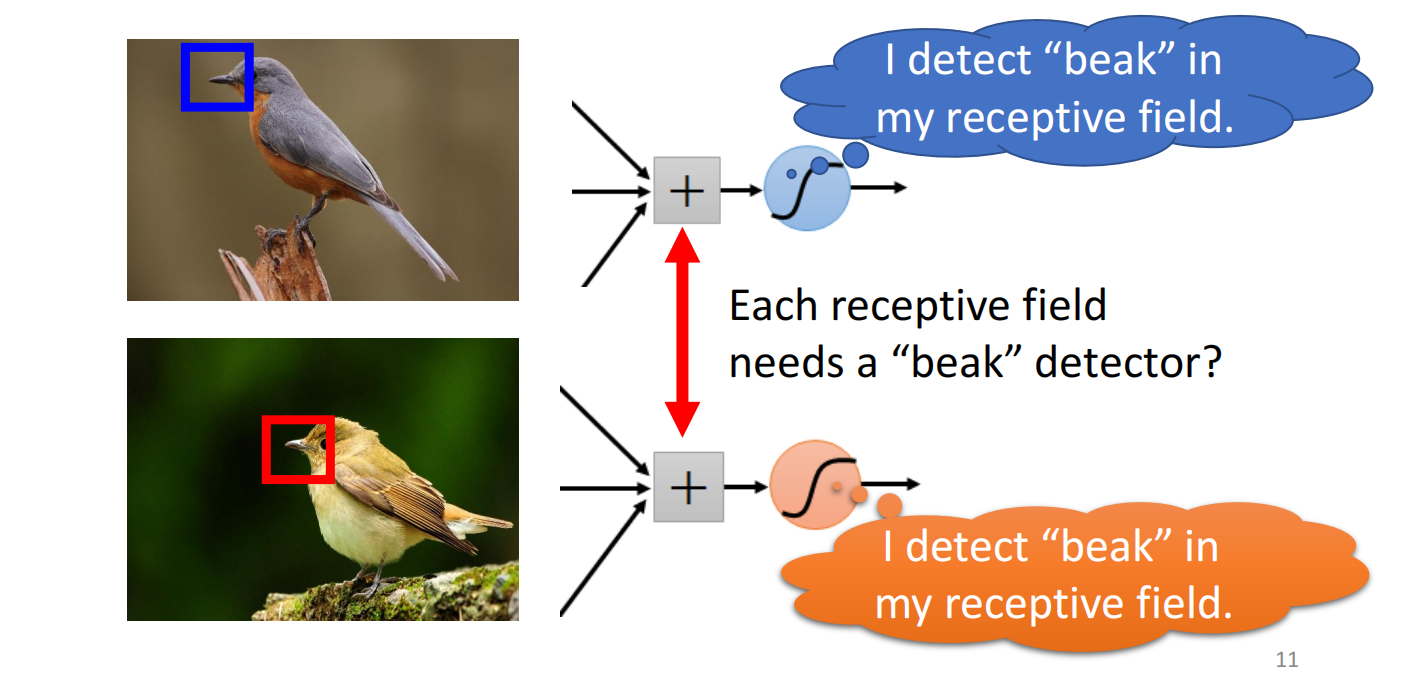
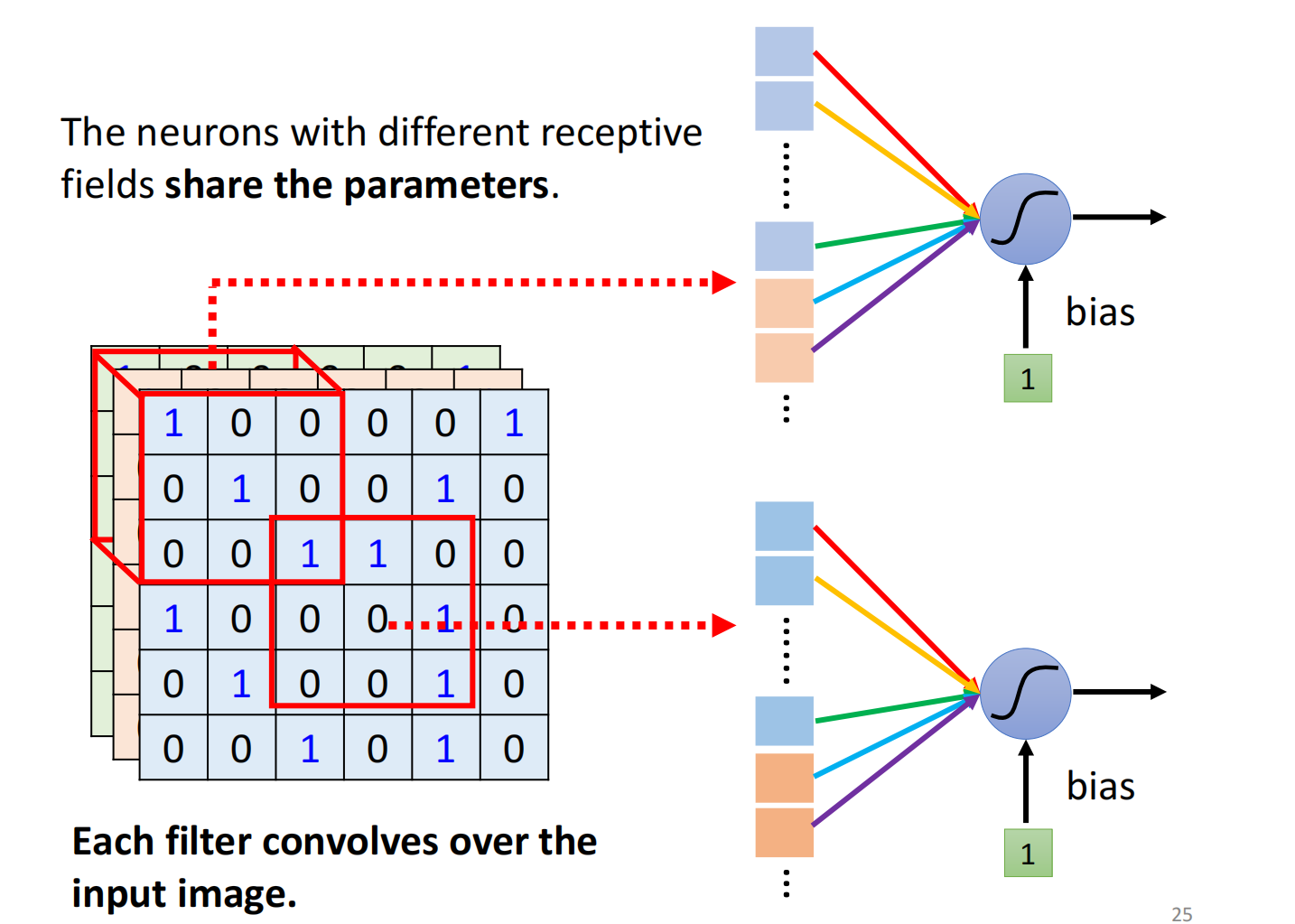
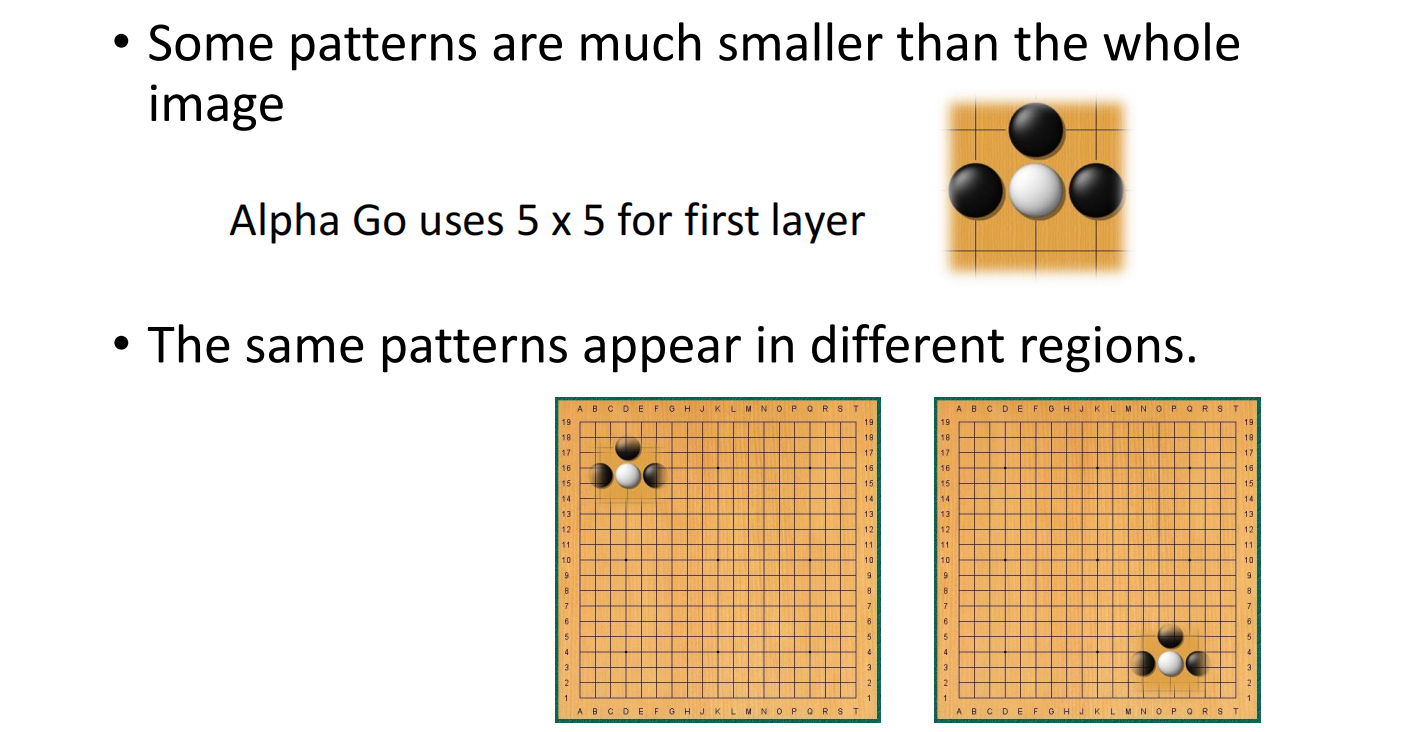
同样的patten可能会出现在图片的不同区域里面
如图所示,这些侦测鸟嘴的Neuron,它们做的事情其实是一样的,只不过他们关注的范围不一样
因此,我们需要每个范围都需要去检测鸟嘴吗?
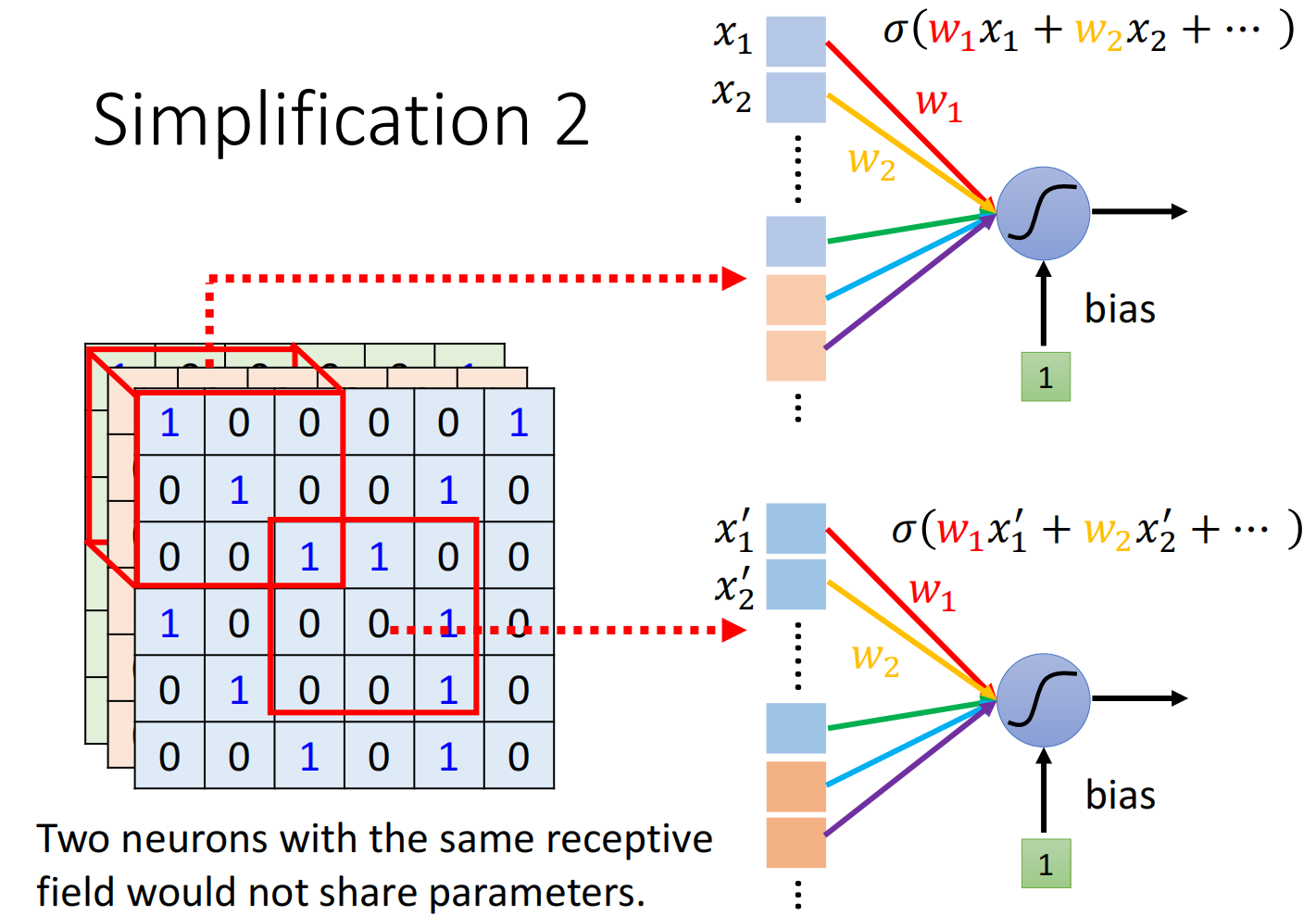
因此我们想实现:共享参数(parameter sharing)
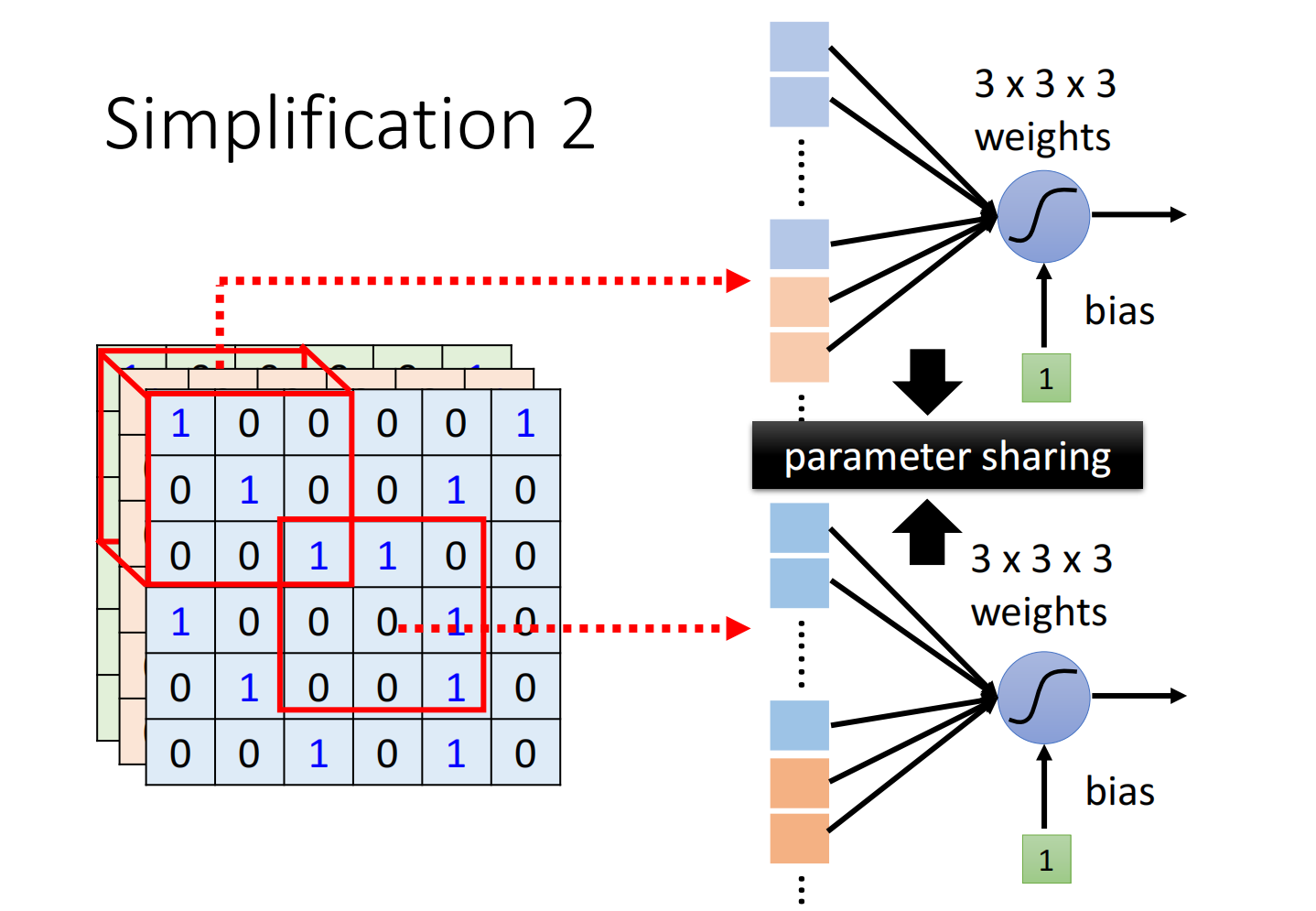
这两个neuron的weight是完全一样的,仅输入不一致(因为位置不同)
常见的共享参数方法为:
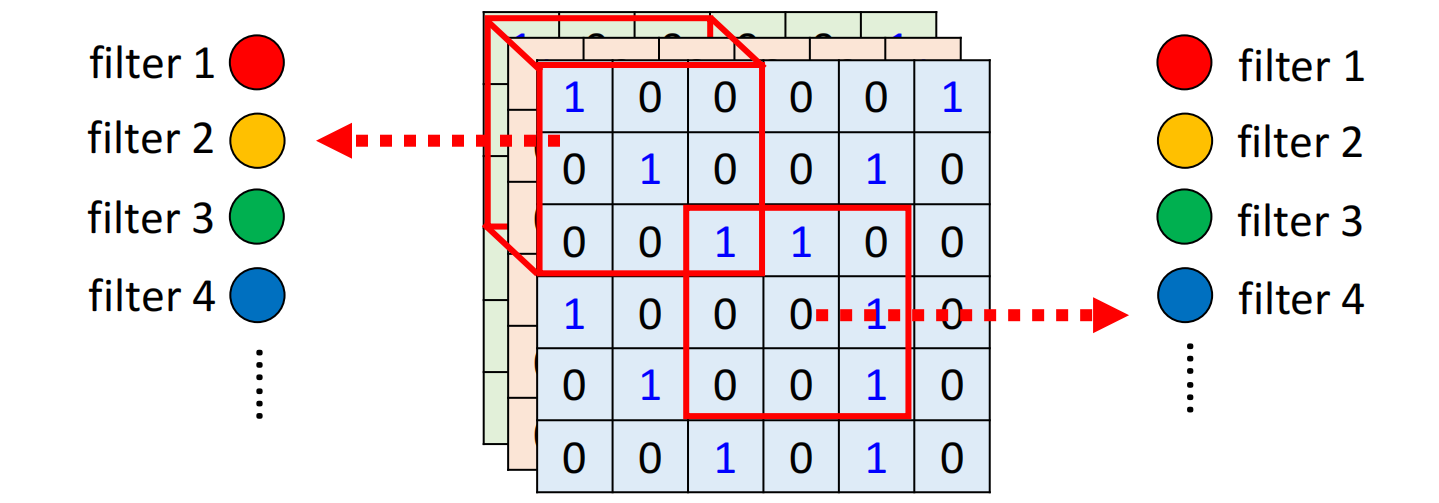
- 每个receptive field都有一组neurons(例如64个)
- 每一个receptive field都只有一组参数,叫做filter,都共用同一组参数

CNN的bias其实是比较大的(不容易overfitting)
Introduction 2
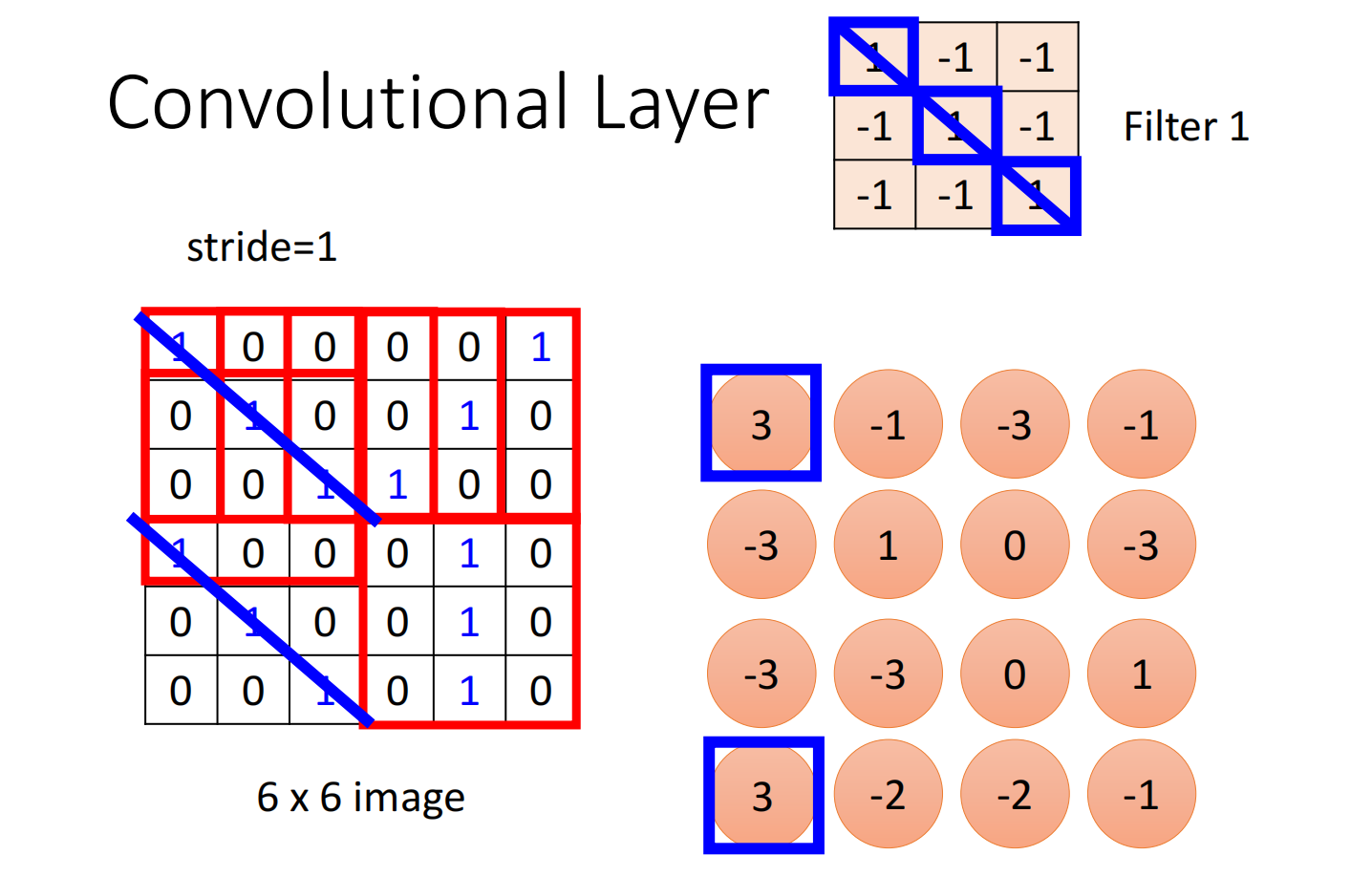
Convolution就是里面有很多的filter,这些filter的大小是 $3 \times 3 \times channel$ ,每一个filter的就是要去抓取pattern
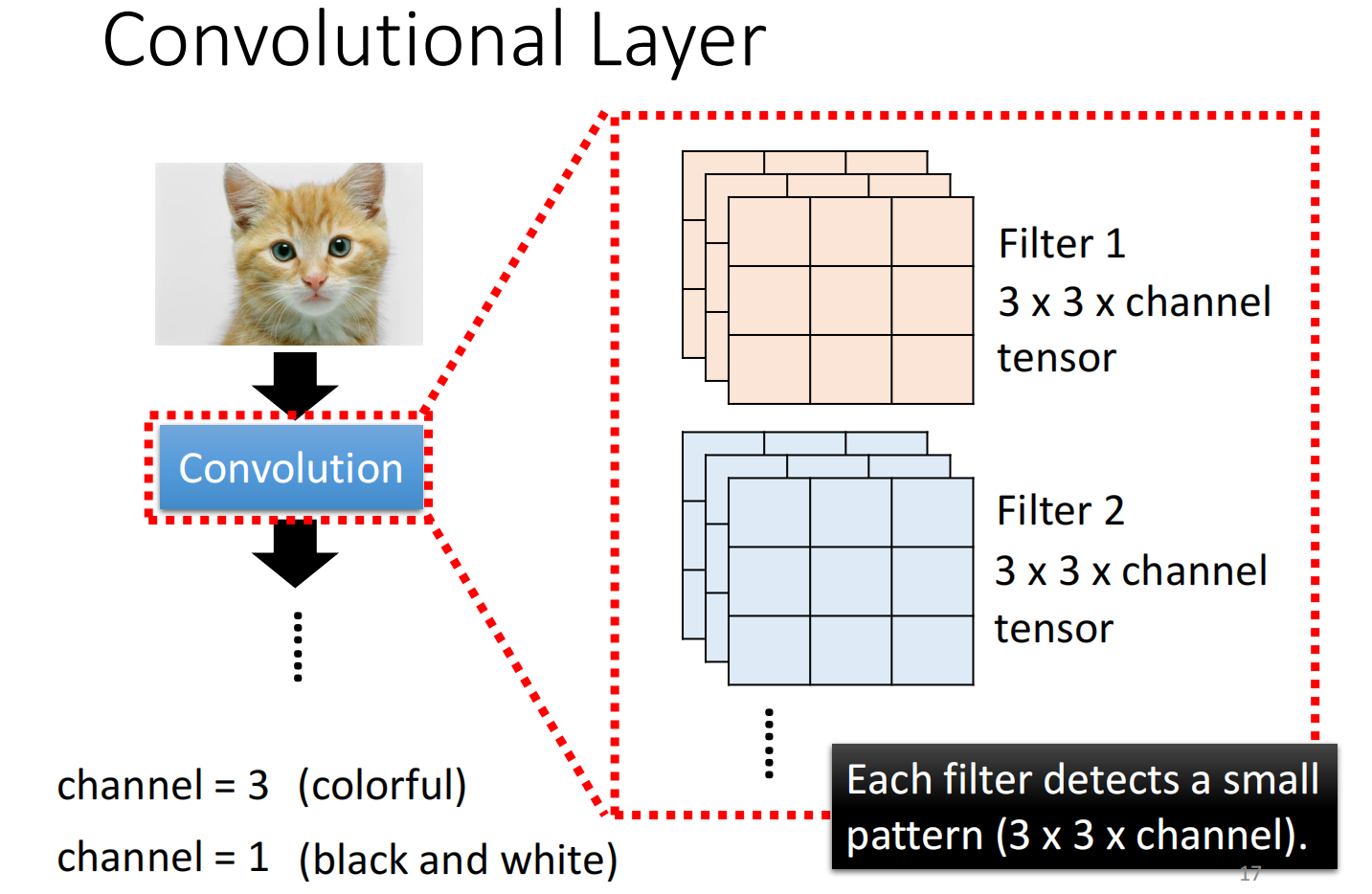
先假设channel 为1,filter的参数已知,其实这些参数的值就是model里面的parameter(实际上filter的数值需要通过gradient decent去寻找)
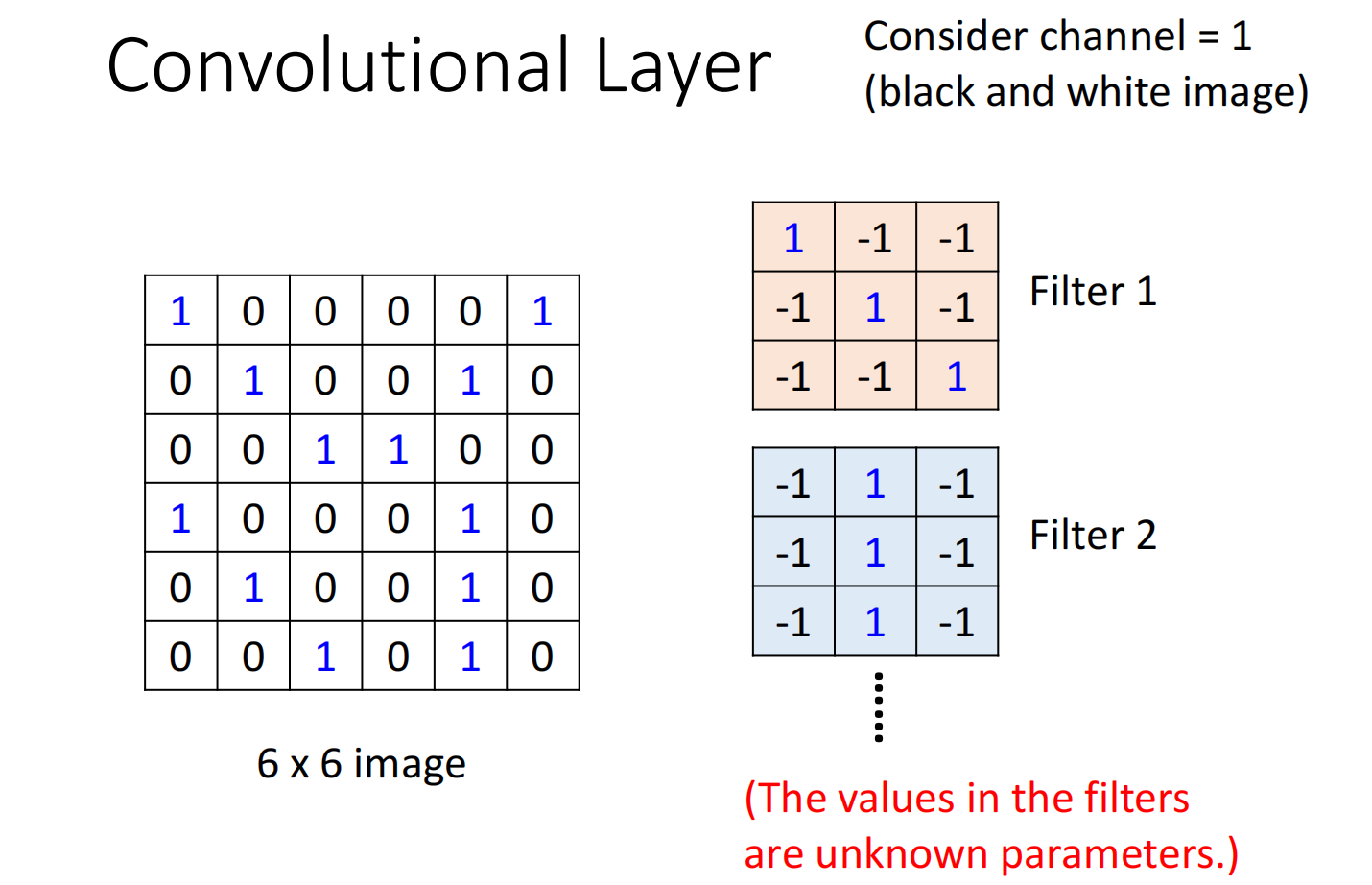
把这个filter跟图片中的9个值做inner product
把每个filter都以此类推
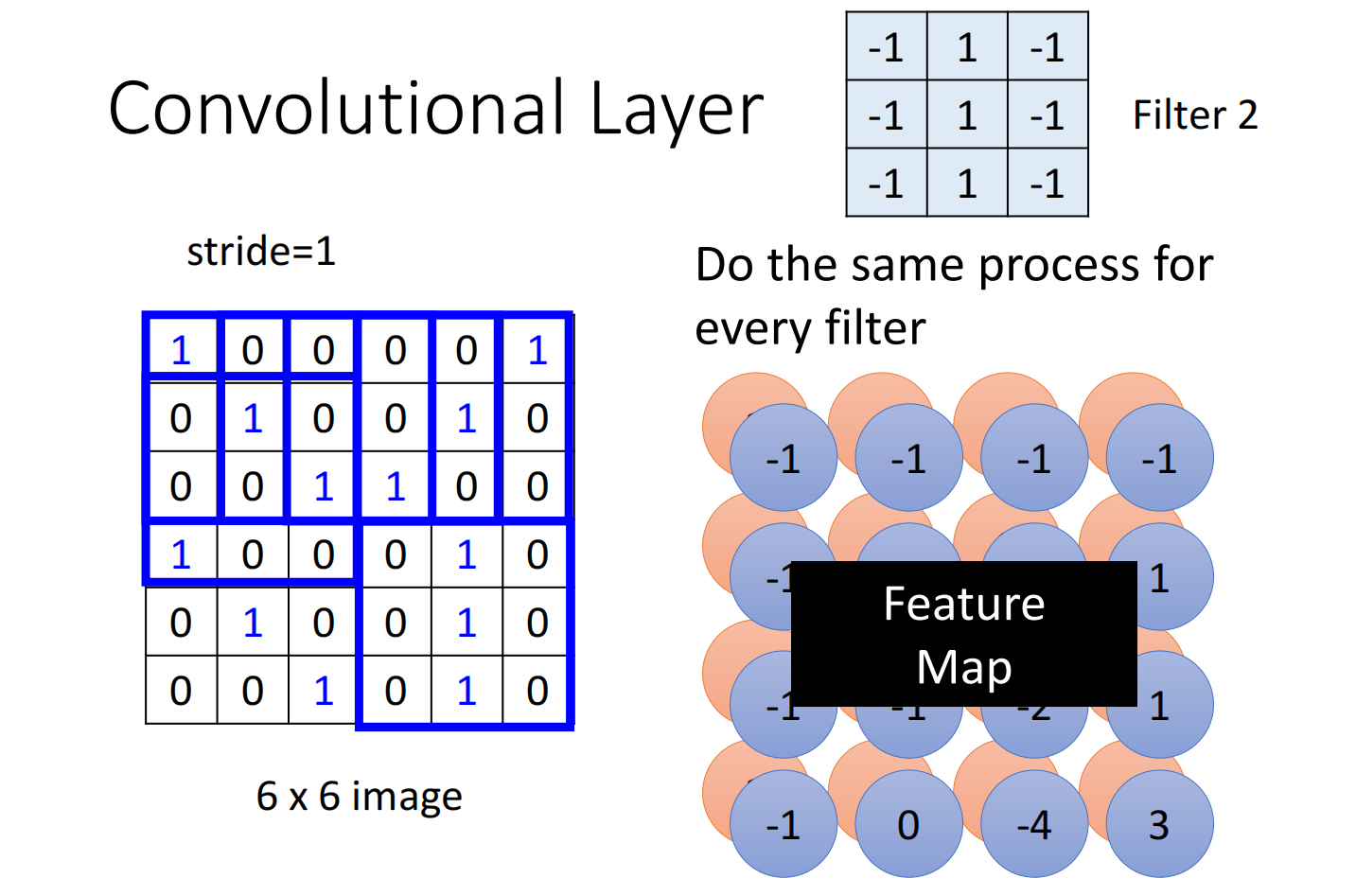
这些结果称之为feature map,我们可以把它看作为一个新的图片,只不过这个图片的channel不是RGB图片的channel,而是每一个channel就是一个filter
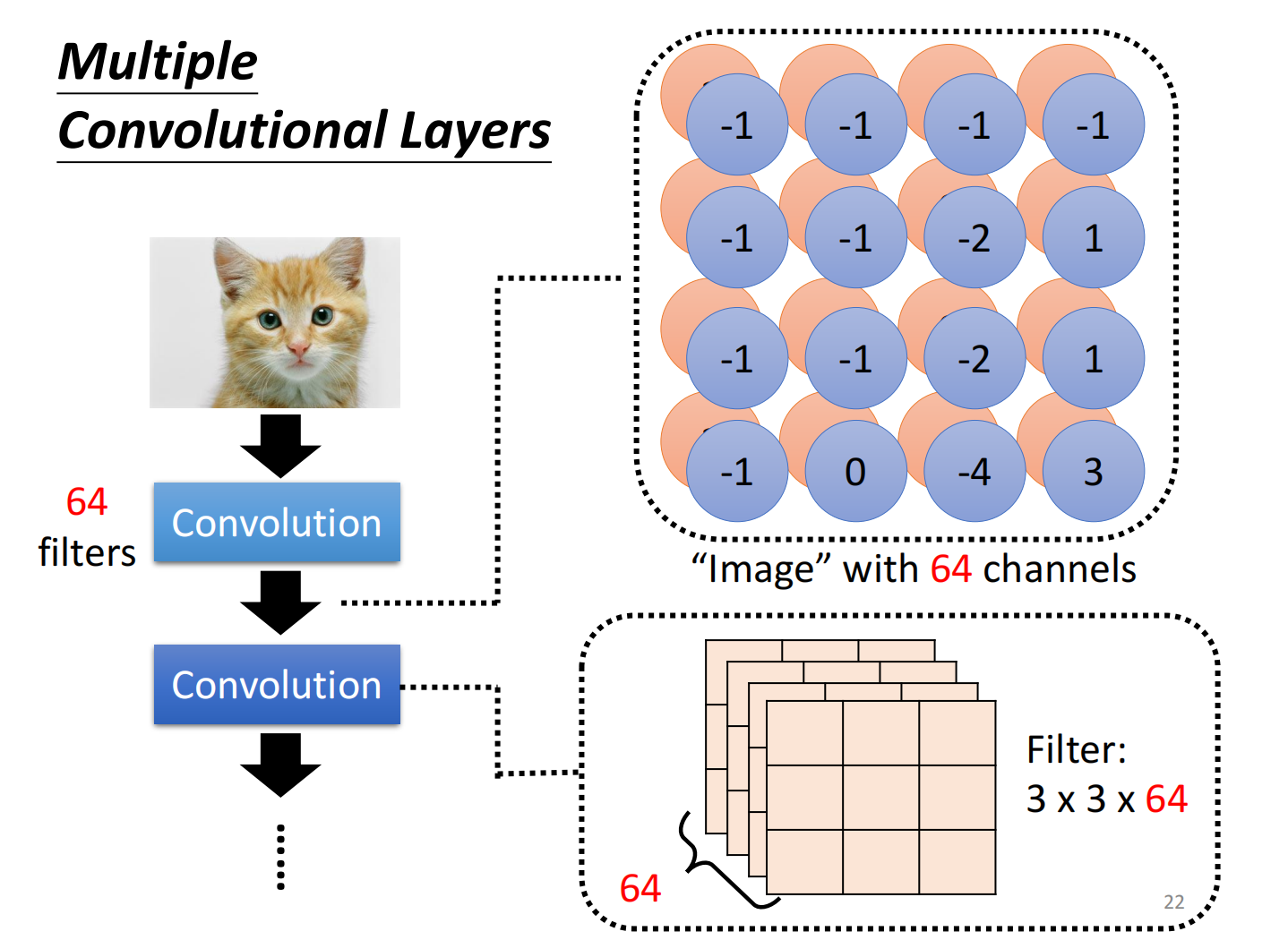

因此network叠的越深,filter能看到的patten越大
第一个里的共用参数其实就是这里的filter
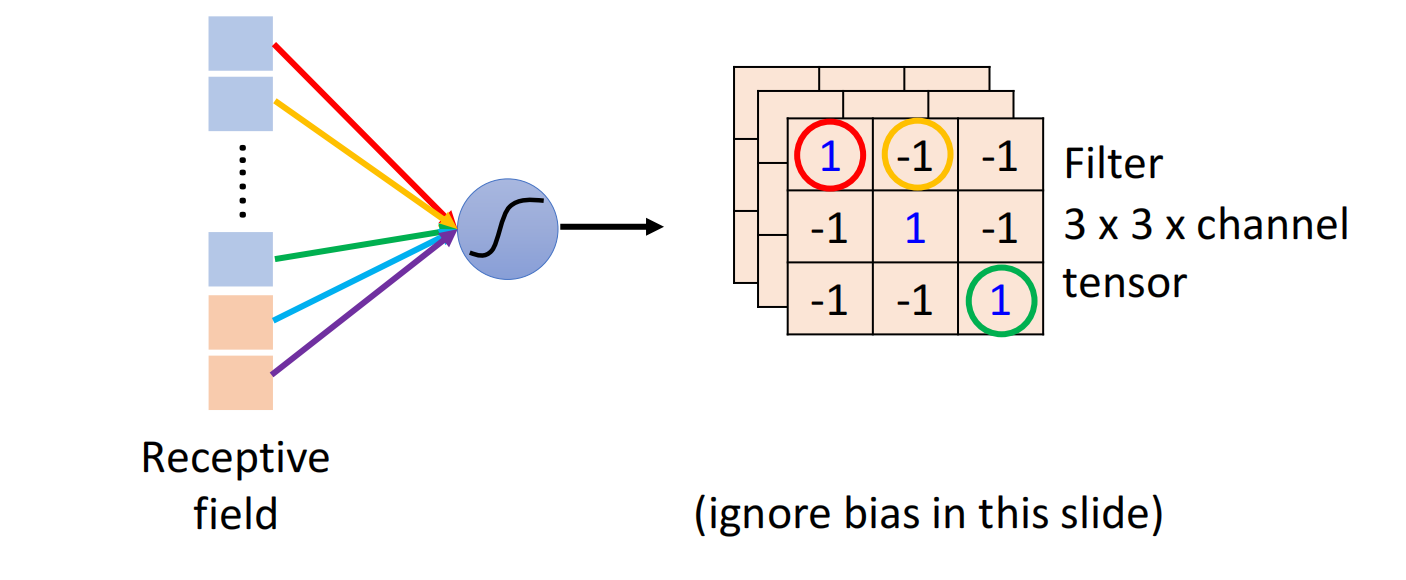
不同的neuron可以share wait,关注不同的范围,这个其实就是把filter扫过一张图片,这个就称之为convolution
Pooling
我们把一张较大的图片做subsampling,比如我们去除奇数列,偶数行,图片大小为原来 $1/4$ ,但实际不会影响图片内容
因此可以降低计算量
Max Pooling将数字几个一组,选一个代表,在max pooling 中选择最大的那个,即pooling是针对已经被filter处理过后的数据进行缩小化
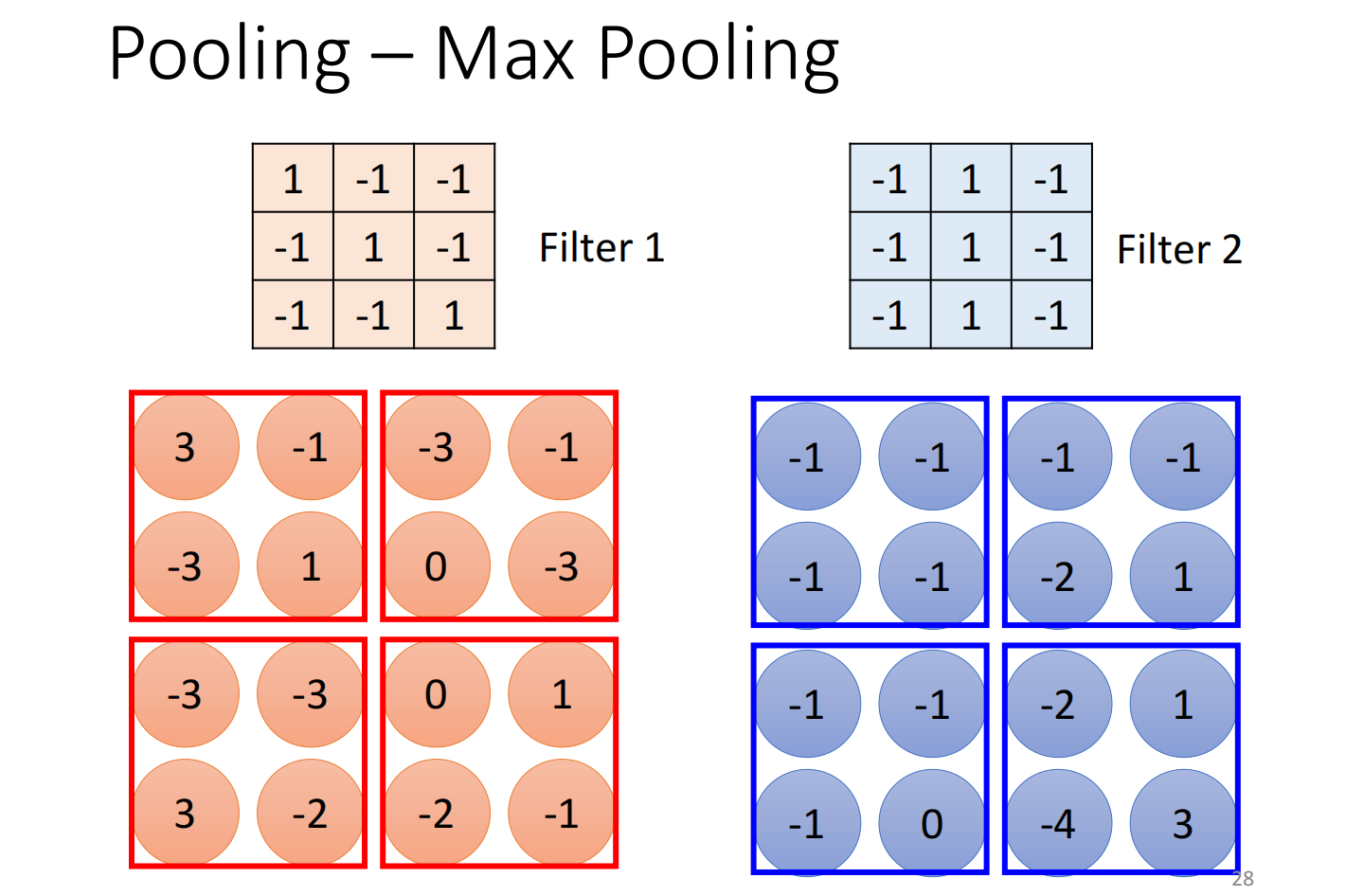
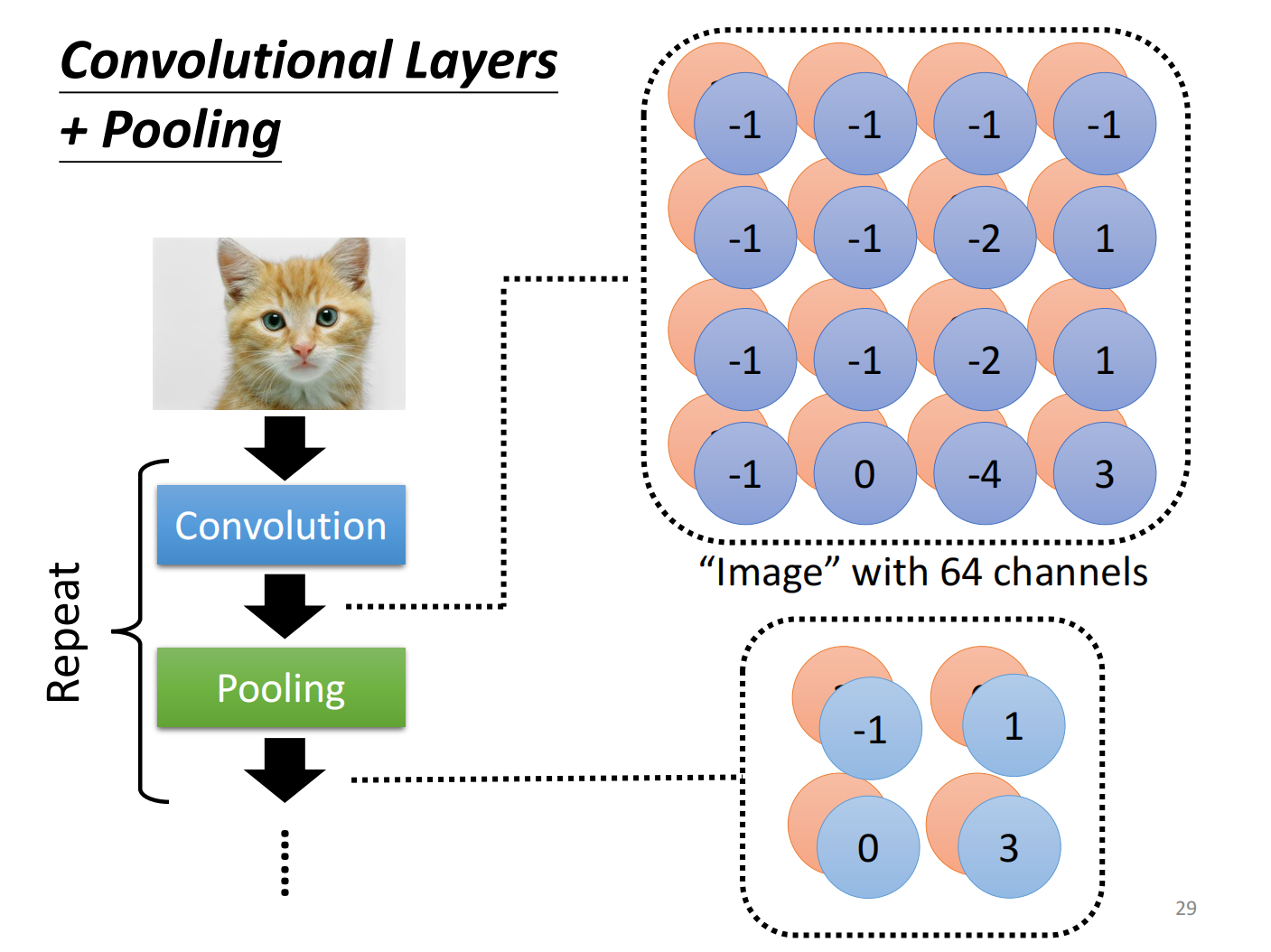
在实际中我们会将convolution 和 pooling 交替使用
但pooling会丢失图片里面的细节,尤其是你需要观察一些很细微的东西
所以近年来很多神经网络的设计开始丢弃pooling,做full convolution的网络
Summary

Flatten就是把矩阵拉直,变成一个向量
最后我们再把向量丢入到Fully Connected Layers进行训练,可能还要再过一个Softmax
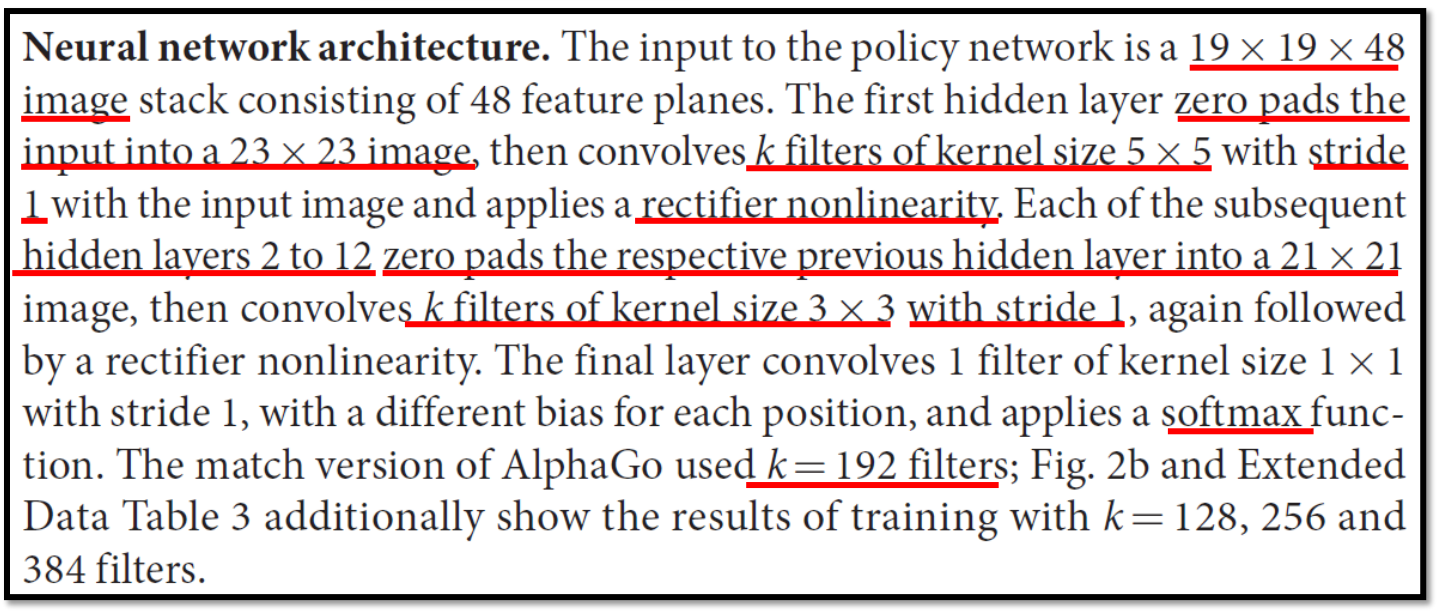
除了影视之外,围棋也可以使用CNN

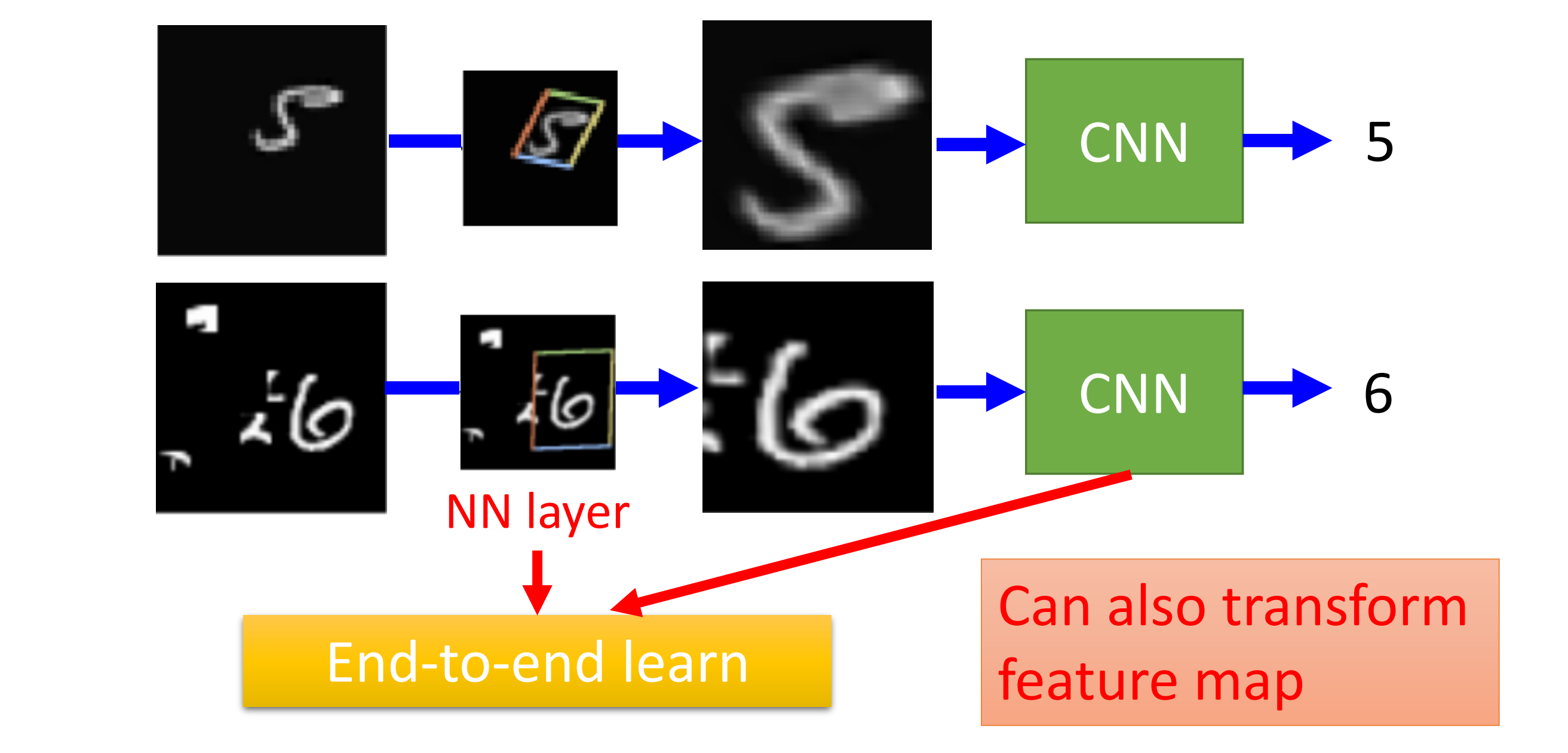
CNN没有办法处理影响影像放大缩小或者旋转的问题
因此我们可以使用Spatial Transformer Layer去解决这个问题